Servo-variateur SD6 et contrôleur de mouvement MC6
09/07/2013
BESOIN D'INFORMATION
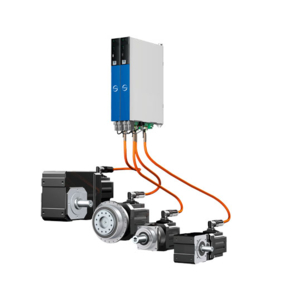
Cette nouvelle génération d'appareils STOBER inaugure une ère nouvelle en matière de conception avec le servo-variateur SD6 et le contrôleur de mouvement MC6. Base sur une combinaison de ces deux appareils, le servo-variateur est exploité en Mode Contrôleur (CBM).
L'application STOBER CBM est basée sur le profil d'appareil CiA402, normalise a l'échelle internationale, pour les entrainements électriques et le contrôle de mouvement. Le servo-variateur SD6 est adressé via des mots de commande, mots de statut, valeurs de consignes et valeurs réelles conformes à la norme CiA402.
Les modes opératoires du servo-variateur SD6:
- Mode de position interpolée (CANopen®): Spécification de position cyclique par le contrôleur de mouvement. L'entrainement suit en régulation de position
- Mode de position synchrone: cyclique (EtherCAT®). Spécification de position cyclique par le contrôleur de mouvement. L'entrainement suit en régulation de position
- Mode de vitesse synchrone: cyclique (EtherCAT®). Spécification de vitesse cyclique par le contrôleur de mouvement. L'entrainement suit en régulation de vitesse
- Mode couple synchrone: cyclique (EtherCAT®). Spécification de couple cyclique par le contrôleur de mouvement. L’entrainement suit en régulation de couple
- Mode pas à pas/STÖBER: Déplacement de l'entrainement non asservi a la commande. Configuration et le mode de secours par exemple
- Mode référencement: Référencement par l'entrainement. Non asservi a la commande. L'entrainement calcule de lui-même les profils de mouvements nécessaires
BESOIN D'INFORMATION
Autres actualités Stober


Réducteurs SERVOFIT PE
07/06/2013
Stober

Servo-entraînement à arbre creux
12/10/2010
Stober

Servoconvertisseur POSIDYN® SDS 5000
08/12/2009
Stober